Pri práci so spoločnosťou Arduino používajú mnohí rádioamatéri používajú krok za krokom motory. Ale čo je to? Ako sa k nemu pripojiť? A ako s ním pracovať? A vo všeobecnosti, kde sa používajú? Odpovede na všetky tieto otázky budú uvedené v tomto článku.
O krokových motoroch
Možno povedať, že krokové motory sú základom presnej robotiky. Vďaka ich presnosti sa používajú všade. Faktom je, že krokové motory používajú pri otáčaní hriadeľa malé kroky, ktoré im umožňujú, aby boli presné pri práci. Bolo to vďaka ich "krokom" a začali byť nazývané krokové motory. Vezmite napríklad tlačiareň. Aj tam sa používa krokový motor. Alebo akýkoľvek manipulátor, kde presnosť je veľmi dôležitá, pretože aj keď robot urobí chybu pol storočia - všetko sa pokazí. Analogové krokové motory môžu byť považované za servopohony, pretože ich programovanie tiež indikuje stupeň otáčania, avšak servomotor, ktorý je podradný krokovým motorom s presnosťou. Existuje však veľa situácií, kedy je použitie servopohonov vhodnejšie ako použitie "chodcov".
Stepper motor 28BYJ-48
Medzi mnohými výbermi krokových motorov je to práve krokový motor modelu 28BYJ-48. Stojí to pomerne lacno, iba 100-150 rubľov za kus. Čo vyzerá ako krokový motor pre Ardouins, nájdete na fotografii nižšie.
Mnoho rádioamatérov uprednostňuje tento konkrétny model kvôli nízkym cenám a dobrej presnosti. Typ motora - unipolárny, počet fáz - 4. Spotrebakrokový motor pre Arduinov od 5 do 12V. Odporúča sa však používať 6-7V. Motory môžu pracovať v dvoch režimoch: v plnom a polovičnom kroku. Odporúča sa používať v režime polotovaru. Je to 5625 stupňov na krok. Pri plnom kroku je krok 1125 stupňov. Hmotnosť motora - 30 gramov.
vodič ULN2003
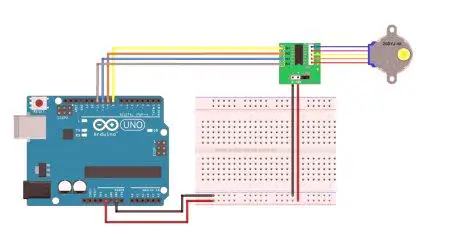
Na pripojenie krokového motora k Arduinovcom sa používa špeciálny ovládač. Jedným z nich je ULN2003. To je spôsobené skutočnosťou, že keď je krokový motor beží, výkon prúdu je dosť silný, čo Arduino kontakty jednoducho nemôže vydržať. Na tento účel sa používa ovládač. Samotný motor sa pripája k vodičovi, je takmer nemožné zameniť všetko, pretože tu je kľúč, ktorý ukazuje, ako presne sa má pripojiť. Nuž, a potom sám vodič pripojí k Arduino pre ďalšiu prácu. Často v obchodoch už je vodič vybavený krokovým motorom. Existujú však prípady, keď sa motory predávajú bez vodiča, musíte venovať pozornosť. Ak si kúpite Aliexpress, je lepšie pracovať iba s osvedčenými predajcami s mnohými hodnoteniami.
Pripojenie
Ako bolo uvedené vyššie, vodič sa používa na spustenie krokového motora z Arduin. Na napájanie motora musíte použiť iný zdroj, aby ste predišli preťaženiu karty Arduino. A ďalšie závery, počnúc IN1 až IN4, sa pripájame k akýmkoľvek digitálnym kontaktom na "Arduinov". Ako vidíte, pripojenie krokového motora k Arduin je pomerne jednoduché. Na obrázku môžete vidieť príklad pripojenia.
Úrad
PreOvládanie krokové motory s "Arduyinov" vo vývojovom prostredí je už pripravená knižnica, ktorá umožňuje motoru pracovať s použitím malého kódu. Keby to nebolo, bolo by pomocou špeciálneho stola písať a počítať pohybový motor, ktorý by bral príliš veľa času. Existuje však aj mínus tejto knižnice. Faktom je, že umožňuje použitie motora iba v režime full-stage. Aj keď sa v prvom kroku odporúča použiť "krok". Ale pri jednoduchých projektoch s jednostupňovým motorom je táto knižnica vhodná. Nazýva sa Stepper. Môžete napísať kód pre ovládanie krokového motora z "Arduin". Náčrt vyzerá ako nižšie uvedený príklad.
#include
int const stepsPerRevolution = 200;
Stepper myStepper (krokyPerRevolution, 891011); //pripojenie k Arduyinov pynam 811
void setup () {
myStepper.setSpeed (60); //nastavenie rýchlosti rotora
Serial.begin (9600);
}
void loop () {
funkcia //čaká, kým tím ide prevádza text a vysiela signál do motora pre otáčanie na určenom počte krokov.
Serial.println ("Pohyb doprava"); //v smere hodinových ručičiek
myStepper.step (stepsPerRevolution);
oneskorenie (1000);
Serial.println ("Pohyb doľava"); //proti smeru hodinových ručičiek
myStepper.step (-stepsPerRevolution);
oneskorenie (1000);
}Toto je príklad rovnaké knižnice pre riadenie krokových motorov. Môžete určiť, koľko krokov musíte vykonať a za akú rýchlosť. Zvážte kód podrobnejšie. Na začiatku je knižnica Stepper už prepojenábolo povedané vyššie. Potom sa vytvorí pole s počtom krokov, ktoré musí krokový motor vykonať. Ďalej sa vytvorí premenná typu stepper s údajmi pomocou kontaktov, ktoré sú pripojené k krokovému motoru Arduino. Rýchlosť je nastavená a už je to proces pohybu krokového motora. Ak však chcete v projekte použiť viac ako jeden motor a pracovať v režime polovičné, môžete použiť knižnice tretích strán. Jedným z nich je Accel Stepper. Táto knižnica sa ukázala veľmi dobre v práci, má veľa príležitostí. Keď práca s jej krokmi je presná, motory sa nezohrievajú. Vo všeobecnosti sa odporúča používať. Ak chcete nainštalovať knižnicu, musíte prevziať a preniesť obsah archívu do priečinka Knižnice v koreňovom adresári Arduino. V tomto článku sme diskutovali príklad pripojenia krokového motora k Arduinovovi, ako aj jeho ovládanie programovým kódom. Každý rádioamatér sa aspoň raz vo svojich projektoch pokúsi s ním pracovať!