Zvýšenie požiadaviek na súradnicové systémy určuje potrebu vývoja nových navigačných princípov. Najmä jednou z podmienok, ktoré diktuje prítomnosť, je zavedenie relatívne nezávislých prostriedkov merania umiestnenia cieľových objektov. Takéto funkcie poskytujú inerciálny navigačný systém, ktorý eliminuje potrebu používať signály z rádiových majákov a satelitov.
Všeobecné informácie o technológii
Inerciálna navigácia je založená na mechanických zákonoch, ktoré umožňujú zaznamenávať parametre pohybu telies vo vzťahu k zavedenému referenčnému systému. Po prvýkrát sa tento princíp plavebnej navigácie uplatňoval pomerne nedávno v lodných gyroskopických kompasoch. Vzhľadom na zlepšenie meracích prístrojov tohto typu bola vytvorená metóda, ktorá určovala namerané parametre na základe zrýchlenia telies. Teória inerciálneho navigačného systému sa začala formovať bližšie k 30. rokom. Od tohto momentu výskumníci tohto smeru začali venovať väčšiu pozornosť zásadám stability mechanických systémov. V praxi je tento koncept ťažko realizovateľný, takže dlho zostal iba v teoretickej forme. Ale v posledných desaťročiach s príchodom špeciálnych zariadení na počítačových inerciálne navigačné nástroje boli používané značne v letectve, technológie vody, a tak ďalej. D.
Súčasti systému
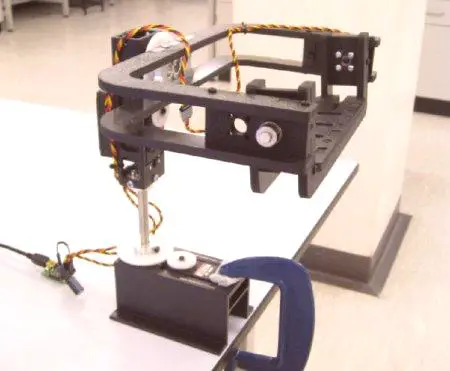
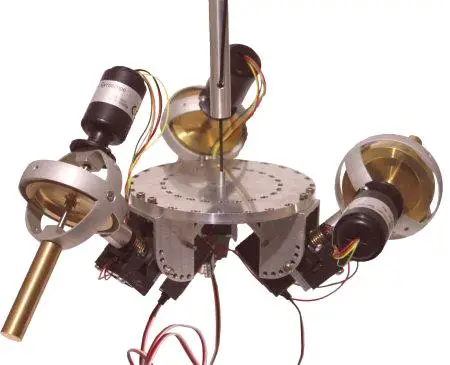
Povinné prvky akéhokoľvek zotrvačného systému sú bloky citlivostimeracie prístroje a výpočtové zariadenia. Prvou kategóriou prvkov sú gyroskopy a akcelerometre a druhá je počítačová technika, ktorá implementuje určité algoritmy výpočtov. Presnosť metódy závisí vo veľkej miere od charakteristík citlivých zariadení. Napríklad spoľahlivé údaje môžu poskytovať inerciálne navigačné systémy len s gyroskopmi presného typu v spojení s akcelerometry. Ale v tomto prípade má technické vybavenie vážnu nevýhodu vo forme vysokej zložitosti elektromechanickej náplne, nehovoriac o veľkej veľkosti zariadení.
Zásada fungovania sústavy
Spôsob určovania súradníc pomocou inerciálneho systému je spracovanie údajov o zrýchlení telies, ako aj ich uhlových rýchlostiach. K tomu sa opäť používajú citlivé elementy inštalované priamo na cieľový objekt, ktorý generuje informácie o mieste, priebehu pohybu, traverzovanej ceste a rýchlosti. Okrem toho princíp inerciálneho navigačného systému umožňuje použiť prostriedky na stabilizáciu a dokonca aj automatické riadenie objektu. Na takéto účely sa používajú lineárne zrýchlenia senzorov s gyroskopickým zariadením. Pomocou týchto zariadení je vytvorený systém správ, ktorý pracuje vo vzťahu k trajektórii pohybu objektu. Vytvorený súradnicový systém určuje uhly sklonu a otáčania. Výhody tejto technológie zahŕňajú autonómiu, schopnosť automatizácie a vysoký stupeňodolnosť proti šumu.
Klasifikácia inerciálnych navigačných systémov
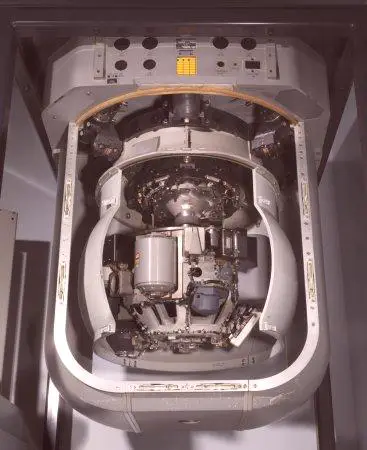
Na základe zvažovaných navigačných systémov sú rozdelené na platformu a platformu (BINS). Prvá sa nazýva geografická a môže obsahovať dve platformy. Jedna je vybavená gyroskopmi a je orientovaná v inerciálnom poli a druhá pracuje pod riadením akcelerometra a stabilizuje sa vo vzťahu k horizontálnej rovine. V dôsledku toho sú súradnice určené pomocou informácií o relatívnom umiestnení obidvoch platforiem. Technologické modely sú BINS. Inerciálny navigačný systém voľnej formy nemá žiadne nevýhody spojené s obmedzeniami používania giroplatmov. Funkcie určovania rýchlosti a umiestnenia objektov v takýchto modeloch sú preložené do digitálnej výpočtovej techniky, ktorá je tiež schopná zachytiť údaje o uhlovej orientácii. Súčasný vývoj systémov BINS je zameraný na optimalizáciu výpočtových algoritmov bez zníženia presnosti výstupných údajov.
Spôsoby určenia orientácie systémov platformy
Neztráca význam a systémy pracujúce s platformami na určenie zdrojových údajov o dynamike objektu. V súčasnosti sa úspešne využívajú tieto typy inerciálnych navigačných modelov platformy:
Geometrický systém. Štandardný dvojplatformový model, ktorý bol popísaný vyššie. Takéto systémy sú veľmi presné, ale majú obmedzenia pri obsluhe vysoko manévrovacích vozidiel pôsobiacich vo vesmíre.Analytický systém. Tiež sú akcelerometre a gyroskopy, ktoré sú voči hviezdam stacionárne. Výhody takýchto systémov zahŕňajú schopnosť efektívne zvládnuť manévrovateľné objekty ako sú rakety, vrtuľníky a stíhacie trysky. Avšak aj v porovnaní s inerciálnym navigačným systémom bez plošiny analytické komplexy preukazujú nízku presnosť určovania parametrov dynamiky objektu. Semi-analytický systém. Poskytuje jedna platforma, ktorá sa neustále stabilizuje v priestore miestneho horizontu. Na tomto základe sú umiestnené gyroskop a akcelerometer a výpočty sú organizované mimo pracovnú plošinu.Vlastnosti systémov inerciálnych satelitov
Ide o sľubnú triedu integrovaných navigačných systémov, ktoré kombinujú výhody zdrojov satelitných signálov a považovaných za inerciálne modely. Na rozdiel od populárnych satelitných systémov takéto komplexy umožňujú ďalšie využitie dát na uhlovej orientácii a formulujú nezávislé algoritmy na určenie polohy pri absencii navigačných signálov. Získanie dodatočných informácií o geolokácii vám umožňuje technicky zjednodušiť modely citlivých prvkov a dať drahé zariadenia. Výhody navigačného systému inerciálnej navigácie zahŕňajú nízku hmotnosť, malú veľkosť a zjednodušené schémy spracovania údajov. Na druhej strane nestabilita mikroelektromechanických gyroskopov spôsobuje nahromadenie chýb pri určovaní údajov.
Oblastipoužitie inerciálnych systémov
Medzi potenciálnych spotrebiteľov technológií inerciálnej navigácie sú zástupcovia rôznych priemyselných odvetví. Nie je to len kozmonautika, letectvo, ale aj automobilový priemysel (navigačné systémy), robotika (kinematická kontrola charakteristík), šport (určenie pohybovej dynamiky), medicína a dokonca aj domáce spotrebiče atď.

Teória inerciálnej navigácie, ktorej koncept sa začal tvoriť v minulom storočí, možno dnes považovať za úplnú časť mechatroniky. Nedávne pokroky však naznačujú, že v prednej časti sa môžu objaviť ďalšie progresívne objavy. Dôkazom toho je úzka interakcia inerciálnych navigačných systémov s počítačovou vedou a elektronikou. Existujú nové ambiciózne úlohy, rozšírenie priestoru pre vývoj súvisiacich technológií, sú tiež založené na teoretickej mechaniky. Súčasne špecialisti v tomto smere aktívne pracujú na optimalizácii technických zariadení, medzi ktoré patrí aj mikromechanické gyroskopy.